Предлагаемые конструкции электрических машин являются необратимыми электродвигателями широкого применения в приводе практически всех классов машин и механизмов. Они могут быть использованы в малой и большой энергетике, как альтернативная замена водяных, паровых и газовых турбин, как двигатели транспортных средств и т.д.
Принцип действия предлагаемых электрических машин настолько прост, что даже у подготовленного инженера вызывает улыбку и после прочтения первых предложений текста чтение заменяется беглым просмотром с выводом о том, что это все давно известно и ничего нового в работе нет.
Попытаюсь доказать обратное.
Обратим внимание на электромеханические системы, построенные по магнитоэлектрической схеме, в которых вращающий момент рамки с указателем создается взаимодействием между полем постоянного магнита с соответствующей арматурой и одним или несколькими проводниками (на рамке) с током.
Магнитоэлектрические приборы изготавливаются с подвижной рамкой Рис. 1, но есть конструкции и с подвижным магнитом.
Измерительный механизм прибора магнитоэлектрической системы состоит из двух частей.
Неподвижная часть состоит из постоянного магнита 1, его полюсных наконечников 2 и неподвижного сердечника 3. В зазоре между полюсными наконечниками и сердечником существует сильное магнитное поле.
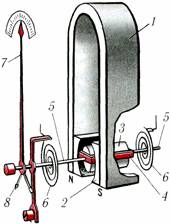
Рис. 1.
Подвижная часть измерительного механизма состоит из легкой рамки 4, обмотка которой навивается на алюминиевый каркас, и двух полуосей 5, неподвижно связанных с каркасом рамки. Концы обмотки припаяны к двум спиральным пружинам 6, через которые в рамку подводится измеряемый ток. К рамке прикреплены стрелка 7 и противовесы 8.
Рамка устанавливается в зазоре между полюсными наконечниками и сердечником. Ее полуоси вставляются в стеклянные или агатовые подшипники.
При прохождении тока по обмотке рамки, она стремится повернуться, но ее свободному повороту противодействуют спиральные пружины. И тому углу, на который рамка все же развернется, соответствует определенная сила тока, который протекает по обмотке рамки. Иными словами, угол поворота рамки пропорционален силе тока. Значит, присутствует момент вращения, причем постоянный, и определяется он только силой протекающего через рамку тока и магнитной индукцией в зазорах магнитной системы. Наверное, никто не будет возражать против утверждения, что если ось рамки зафиксировать, то магнитная система придет в движение и повернется на такой же угол только в обратном направлении.
Предположим, что неподвижный сердечник 3 является подвижным (свободно вращающимся вокруг собственной оси). Что произойдет? Вот на этот вопрос нет ответа ни в учебниках, ни в монографиях маститых ученых, ни в популярных статьях. Хотя, что-то должно происходить. Вернемся к этому в дальнейшем.
Таким образом, выяснено, что рамка с током, имеющая свободу вращения в зазоре магнитной системы подвержена влиянию пары сил с ее стороны, а сама магнитная система находится под влиянием такой же пары сил со стороны рамки с током.
Выясним теоретически с помощью графического изображения и классических физических законов, какие силы воздействуют на элементы механизма прибора изготовленного по магнитоэлектрической схеме. Для этого воспользуемся упрощенным фронтальным изображением поперечного разреза магнитоэлектрического прибора Рис. 2.
Рис. 2.
Обозначения элементов 1 – 4 соответствуют обозначениям, приведенным на Рис.1.
При обесточенной рамке 4, сердечник 3 намагничивается магнитным потоком постоянного магнита Фпм с полюсами, которые определяются листками Ампера 5. На сердечник 3 действуют только радиальные силы со стороны полюсных наконечников. Тангенциальных составляющих эти силы не имеют. Сердечник 3 имеет возможность свободного вращения вокруг своей оси. В процессе вращения он сохраняет положение магнитных полюсов, которое определяет поток Фпм постоянного магнита в соответствии с законом Ампера.
При прохождении тока Iр по рамке 4 Рис. 3, он возбуждает магнитный поток Фр в сердечнике 3 ортогональный магнитному потоку Фпм. Магнитный поток Фр замыкается через полюсные наконечники 2 и полюсы намагничивания сердечника 3 за счет своих листков Ампера. В сумме происходит смещение полюсов намагничивания сердечника 3 относительно направления магнитного потока Фпм. В результате к сердечнику 3 будет приложен тангенциальный электромагнитный момент Мэм, который будет стремиться совместить направление результирующего магнитного потока Фрез = Фпм + Фр с направлением магнитного потока Фпм.
На рамку с током Iр в зазорах с магнитной индукцией В будет действовать пара сил имеющих значение Fр = B n Iр l, где n – количество витков, l – длина зазора. Направление действия этих сил определяется по правилу левой руки.
Рис. 3.
На полюсные наконечники магнитной системы 2 будет действовать пара сил Fпн направленная в сторону противоположную действию пары сил Fр и равная им по значению.
Таким образом, выяснено:
1. При неподвижной магнитной системе 1 – 3 рамка с током 4 приходит во вращение с целью совмещения направления магнитного потока Фрез с направлением магнитного потока Фпм. Угол поворота рамки ограничивается противодействием пружины 6 и зависит от значения тока Iр. В отсутствие пружины рамка с током повернется на 900 и центры лепестков Ампера 5, индуцированные магнитными потоками Фпм и Фр, на поверхности сердечника 3 совместятся. Рамка займет положение устойчивого равновесия.
2. При неподвижной рамке с током 4 приходит во вращение магнитная система 1 – 3 с целью совмещения направления магнитного потока Фрез с направлением магнитного потока Фпм. Угол поворота магнитной системы ограничивается противодействием пружины 6 и зависит от значения тока Iр. В отсутствие пружины магнитная система повернется на 900 и центры лепестков Ампера 5, индуцированные магнитными потоками Фпм и Фр, на поверхности сердечника 3 совместятся. Вся система займет положение устойчивого равновесия.
3. При неподвижных рамке с током 4 и элементами магнитной системы 1 – 2, под действием электромагнитного момента Мэл, который зависит от значения тока Iр, приходит во вращение сердечник 3 с целью совмещения направления магнитного потока Фрез с направлением магнитного потока Фпм. Однако в силу свойств электротехнической стали, сердечник 3 по мере поворота будет сохранять направление магнитного потока Фрез и значение электромагнитного момента Мэл в масштабе доменной структуры материала. Сердечник 3 будет постоянно набирать обороты до тех пор, пока момент сопротивления на его валу Мс не сравняется с электромагнитным моментом Мэл.
Возвращаясь к ранее заданному вопросу: «Что произойдет?» можно сделать вывод о том, что в процессе этой работы открыто и экспериментально установлено неизвестное ранее объективно существующее свойство материального мира, заключающееся в том, что в электромеханических системах, построенных по магнитоэлектрической схеме, свободновращающийся сердечник рамки с током, при фиксации ее и постоянного магнита возбуждения с арматурой, находится под воздействием постоянного электромагнитного момента за счет чего вращается и увеличивает скорость вращения до тех пор, пока момент сопротивления на его валу не сравняется с электромагнитным моментом.
Открытие этого свойства электромеханических систем, построенных по магнитоэлектрической схеме, позволило разработать высокоэффективные бесконтактные универсальные необратимые электрические двигатели постоянного тока с незначительным потреблением электрической мощности.
При неподвижной рамке с током 4 и элементами магнитной системы 1 – 2 вращающийся сердечник 3 не индуцирует в обмотке рамки ЭДС противодействующей протеканию тока через обмотку.
При работе в известных и используемых на практике режимах работы магнитоэлектрических механизмов в режиме электродвигателя осуществляется либо движение рамки с током, связанной с сердечником, либо движение просто рамки с током при неподвижной магнитной системе, либо движение магнитной системы относительно рамки с током, связанной с сердечником и т.д. Во всех случаях получения вращательного движения ротора есть два сценария:
1. Движение рамки с током относительно неподвижного магнитного поля с коммутацией обмоток для сохранения ортогональности магнитных полей возбуждения и якоря.
2. Движение магнитной системы с источником возбуждения (либо самого источника возбуждения с неподвижной системой замыкания магнитного потока) относительно неподвижной рамки с током с такой же коммутацией обмоток якоря.
В любом случае в обмотках якоря индуцируется ЭДС, направленная против напряжения внешнего источника питания. По мере увеличения числа оборотов ротора (действительной или кажущейся линейной скорости движения проводника относительно магнитного поля возбуждения) ток в обмотках под действием этой ЭДС уменьшается, соответственно уменьшается, и вращающий момент. Для его увеличения приходится повышать напряжение (мощность) питания электродвигателя. В современных электродвигателях практически вся мощность, подводимая для питания, расходуется на преодоление противодействующей ЭДС.
Например, серийный электродвигатель постоянного тока типа 4ПН 200S имеет следующие характеристики: мощность 60 кВт; напряжение 440 В; ток 149 А; частота вращения 3150/3500 об/мин; кпд 90,5%; длина статора 377 мм; диаметр ротора 250 мм, напряжение потерь 41,8 В; напряжение на преодоление индуцированной ЭДС 398,2 В; мощность на преодоление потерь 6228 Вт; вращающий момент (3500 об/мин) 164,6 Нм.
В магнитоэлектрической машине, работающей в открытом новом режиме, при вращении ротора с неподвижной обмоткой и неподвижной магнитной системой 1 – 2 ЭДС, противодействующая протеканию тока через обмотку, не индуцируется. В этом случае питающему напряжению требуется преодолеть только активное (омическое) сопротивление обмотки для создания в ее проводниках необходимой плотности тока и этот ток, а с ним и потребляемая мощность будут неизменны при любой скорости вращения ротора.
На Рис. 4 представлена схема одного из вариантов моментного электродвигателя постоянного тока без коллектора и инвертора, выполненного по магнитоэлектрической схеме с неподвижной магнитной системой возбуждения (обмотки возбуждения 1, ярмо 2 и полюсные наконечники 3), неподвижной обмоткой якоря 4 и подвижным сердечником якоря (ротором) 5. В этом электродвигателе в обмотке якоря не индуцируется ЭДС, противодействующая протеканию тока якоря, который определяет значение электромагнитного момента. Электромагнитный момент ротора численно равен моменту, прилагаемому к обмотке якоря, и рассчитывается по закону Ампера и правилу левой руки.
Рис. 4.
Электродвигатель постоянного тока без коллектора и инвертора по магнитоэлектрической схеме можно выполнить с вращающимися полюсами в магнитной цепи возбуждения, схема поперечного разреза такого двигателя приведена на Рис. 5. Он будет иметь характеристики такие же, как и у двигателя, схема которого приведена выше. Отличие заключается в том, что сердечник якоря 5 с обмоткой 4 у него неподвижен, а полюса магнитной системы 6 выполнены в виде вращающихся цилиндров. Наличие двух роторов в некоторых случаях может оказаться полезным.
Рис. 5.
Обмотка возбуждения 1, ярмо 2 и полюсные наконечники пояснений не требуют.
Сердечник якоря 5 может быть как с зубцами, так и без них. В нем нет потерь на перемагничивание при питании чисто постоянным током. Проходящие через него магнитные потоки неподвижны. Однако при питании двигателя переменным, пульсирующим или током с широтно-импульсной модуляцией для регулировки момента вращения сердечник якоря необходимо делать шихтованным. Более того, шихтованный сердечник технологичней в изготовлении. Вращающиеся полюса 6, также необходимо делать шихтованными с хорошей изоляцией между пластинами. При вращении с большой скоростью в их теле могут наводиться значительные по величине униполярные ЭДС, которые вызывают появление вихревых токов.
Рис. 6.
На Рис. 5 изображена схема электродвигателя, у которого имеется существенный недостаток – большие потоки рассеяния магнитного поля возбуждения. Этот недостаток легко устраняется путем размещения обмоток возбуждения совместно с полюсными наконечниками Рис.6. Обозначения элементов на этой схеме соответствуют обозначениям, принятым на прежнем рисунке. На Рис. 7 приведена схема электродвигателя с вращающимися полюсами и возбуждением от постоянных магнитов 1. Остальные обозначения соответствуют обозначениям, принятым на Рис. 5.
На Рис. 8 приведена схема электродвигателя с вращающимися полюсами, имеющего повышенную площадь полюсов в нерабочем зазоре. Такая схема применима для уменьшения магнитного сопротивления в магнитной системе возбуждения и машина имеет несколько меньшие габаритные размеры. Возбуждение от постоянных магнитов 1, остальные обозначения соответствуют обозначениям, принятым на Рис. 5.
Электромагнитные моменты, прилагаемые к роторам, во всех рассмотренных схемах электродвигателей с вращающимися полюсами рассчитываются по закону Ампера и правилу левой руки.
Рис. 7.
Рис. 8.
Таким образом, в процессе этой работы открыто и экспериментально установлено неизвестное ранее объективно существующее свойство материального мира, заключающееся в том, что в электромеханических системах, построенных по магнитоэлектрической схеме, и выполненных с вращающимися полюсами (роторами) в магнитной цепи возбуждения роторы находятся под воздействием постоянных электромагнитных моментов за счет чего вращаются и увеличивают скорость вращения до тех пор, пока моменты сопротивления на их валах не сравняются с электромагнитными моментами.
Открытие этого свойства электромеханических систем, построенных по магнитоэлектрической схеме, позволило разработать высокоэффективные бесконтактные универсальные необратимые электрические двигатели постоянного тока с незначительным потреблением электрической мощности.
Если мощность с обоих роторов необходимо суммировать, то это производится с помощью редуктора. Более того, применяя редуктор можно разгонять роторы до предельных значений скорости вращения по прочности. Учитывая простоту геометрической формы ротора, окружные скорости на его поверхности могут быть значительно выше, чем у роторов других типов электродвигателей. Двигатели, построенные на этом принципе, будут иметь рекордные показатели по удельной мощности Вт/кг и Вт/дм3. В сочетании с малой потребляемой мощностью они будут необходимы в малой и большой энергетике, как альтернативная замена водяных, паровых и газовых турбин, в автомобилестроении, малой и большой авиации, судостроении и т.п. Они будут востребованы при реализации Концепции "Электрический самолет". Более того, эти электродвигатели могут заменить в турбовентиляторных установках самолетов и вертолетов силовые агрегаты.
Проведем инженерную оценку параметров двигателя с вращающимися полюсами с возбуждением постоянными магнитами исходя из габаритных размеров. Выберем реальные размеры вращающихся полюсов и скорость их вращения, не противоречащие физическому смыслу.
Исходные данные.
Радиус вращающегося полюса - 0,05м, длина рабочего зазора – 0,15 м, площадь под обмотку на якоре на одну сторону – 6 см2 (600 мм2), провод ПЭЛ- 1,26 сечением - 1,094 мм2, коэффициент заполнения сечения проводом – 0,794, средняя толщина якоря – 0,04 м, магнитная индукция в рабочем зазоре 0,7 Тл, сила тока (для длительной непрерывной работы) - 11 А, подшипники стандартные на 12000 об/мин (200 об/с).
Расчет.
Количество проводников в рабочем зазоре n = 600х0,794 = 476 шт.
Длина провода на якоре L = [(0,15х2) + (0,04х2)]х493 = 187,34 м.
Сопротивление провода R = 0,0175х187,34/1,094 = 3 Ом.
Электромагнитная сила в одном зазоре F = 0,7х11х476х0,15 = 549,78 Н.
Момент вращения на один полюс М = 549,78х0,05 = 27,489 Нм.
Мощность одного вала Р = 2хПи х 27,489х200 = 34543,7 Вт.
Общая мощность 2Р = 69087 Вт.
Напряжение питания U = 11х3 = 33 В.
Потребляемая электрическая мощность Рэл = 33х11 = 363 Вт.
Электродвигатель с вращающимися полюсами без коллектора и инвертора потребляет электрической мощности в 190 раз меньше, чем вырабатывает механической.
Таким образом, на основе, поведенной инженерной оценки параметров электродвигателя с вращающимися полюсами без коллектора и инвертора, можно сделать вывод о том, что в процессе его работы существует возможность отбора части механической мощности и преобразования ее в электрическую мощность для обеспечения собственных нужд.
При использовании электродвигателей в различных устройствах и механизмах можно выделить два основных режима работы:
- непрерывное вращательное движение с плавными колебаниями момента вращения около некой средней величины при постоянной скорости вращения (в основном это механизмы для выработки электрической мощности);
- динамическое вращательное движение с изменяемым моментом вращения от нуля до максимального значения и изменением скорости вращения также от нуля до максимального значения (сюда можно отнести тяговые двигатели транспортных средств, грузоподъемных механизмов и т.п.).
Исходя из этих положений, к вопросу отбора мощности для собственных нужд необходимо подходить разными способами.
В случае продолжительной работы агрегата (механизма) с некой средней мощностью в квазистационарном режиме существует возможность непосредственного отбора требуемой механической мощности с вала электродвигателя и преобразования ее в электрическую мощность для собственных нужд. На Рис. 9 приведен один из вариантов схемы такого отбора.
Рис. 9.
Для случая динамического вращательного движения кроме отбора мощности на собственные нужды тягового электродвигателя необходимо также учитывать, что в любом случае на любом транспортном или ином средстве всегда необходимо питать освещение, автоматику, отопление и т.п. в аварийных режимах. Поэтому при разработке любой конструкции тягового электродвигателя необходимо "вписывать" ее в окружающую техническую, эргономическую и экологическую среды, используя при этом ресурсы всех окружающих систем. Здесь вариантов множество и зависят они как от деятельности конструктора, так и от свойств системы, которые определяет предприятие в соответствии со своим брэндом. На Рис. 10 приведен один из вариантов питания тягового электродвигателя транспортного средства.
Рис. 10.
Схема, приведенная на Рис. 9 пояснений не требует. Для питания тяговых электродвигателей, работающих в динамических режимах целесообразно использовать электростанцию собственных нужд требуемой мощности, обеспечивающую гарантированное электропитание жизненно важных узлов и агрегатов транспортного или иного средства от аккумуляторной батареи. Электропитание тягового электродвигателя обеспечивается непосредственно от постоянно работающей электростанции собственных нужд. Для привода электростанции собственных нужд применяется маломощный электродвигатель, не индуцирующий ЭДС направленную против действия питающего тока.
Таким образом, в процессе выполнения настоящей работы автором сделаны два открытия:
1. Открыто и экспериментально установлено неизвестное ранее объективно существующее свойство материального мира, заключающееся в том, что в электромеханических системах, построенных по магнитоэлектрической схеме, свободновращающийся сердечник рамки с током, при фиксации ее и постоянного магнита возбуждения с арматурой, находится под воздействием постоянного электромагнитного момента за счет чего вращается и увеличивает скорость вращения до тех пор, пока момент сопротивления на его валу не сравняется с электромагнитным моментом.
2. Открыто и экспериментально установлено неизвестное ранее объективно существующее свойство материального мира, заключающееся в том, что в электромеханических системах, построенных по магнитоэлектрической схеме, и выполненных с вращающимися полюсами (роторами) в магнитной цепи возбуждения роторы находятся под воздействием постоянных электромагнитных моментов за счет чего вращаются и увеличивают скорость вращения до тех пор, пока моменты сопротивления на их валах не сравняются с электромагнитными моментами.
На основании открытий этих свойств магнитоэлектрических электромеханических систем разработаны схемы построения высокоэффективных универсальных необратимых электрических двигателей постоянного тока без коллектора и инвертора с незначительным потреблением электрической мощности.
Для использования электродвигателей в различных устройствах и механизмах выделены два основных режима работы:
- непрерывное вращательное движение с плавными колебаниями момента вращения около некой средней величины при постоянной скорости вращения;
- динамическое вращательное движение с изменяемым моментом вращения от нуля до максимального значения и изменением скорости вращения также от нуля до максимального значения.
Исходя из этих положений, разработаны схемы отбора мощности для собственных нужд.
Следует отметить наиболее характерные свойства электрических машин рассмотренных конструкций:
· работа только в режиме электродвигателя постоянного, пульсирующего, переменного тока или тока с ШИМ - модуляцией;
· отсутствие коллекторного устройства или инвертора;
· отсутствие ЭДС в якорной обмотке, препятствующей протеканию тока;
· невозможность работы в режиме рекуперации;
· момент вращения двигателей независим от частоты вращения ротора.
Литература
1. Физический энциклопедический словарь. Гл. ред. А.М. Прохоров. Ред. кол. Д.М. Алексеев, А.М. Бонч-Бруевич, А.С. Боровик-Романов и др. – М.: Сов. энциклопедия, 1983.
2. Хвостов В.С. Электрические машины. Машины постоянного тока: Учеб. для студ. электром. спец. вузов / Под ред. И.П. Копылова. – М.: Высш . шк., 1988.
3. Бут Д. А. Бесконтактные электрические машины. – М.: Высшая школа, 1990.
4. А Абрамов и П. Хлебников. Самодельные электрические и паровые двигатели. М.: Л.: Государственное Издательство Детской Литературы, 1946.
4. Громов Н.Н. Электрическая машина с вращающимися полюсами в магнитной цепи возбуждения. Нижний Новгород, 2006.
Сайт http://www.skif.biz/index.php?name=Files&op=showcat&cid=4&pagenum=2
5. Урок 22. Магнитное поле – 3. Преподаватель: Клятченко Виктор Фомич.
Сайт http://www.home-edu.ru/user/f/00000951/22/221.htm
6. Конспекты автора. ВВКУРЭ ПВО страны. Вильнюс, 1970 – 1973.
7. Конспекты автора. ВИРТА ПВО. Харьков, 1982 – 1986.
Н.Н. Громов
Нижний Новгород
2006 г.
Ремарка к статье «Электрическая машина с вращающимися полюсами в магнитной цепи возбуждения (2-я редакция)»
Первая опубликованная редакция статьи под этим названием имела некоторые недочеты, связанные с упрощенным изложением и была слабо воспринята даже подготовленными инженерами. Во 2-й редакции автор попытался сделать изложение материала в более доступной форме с целью довести его до широкого круга заинтересованных лиц.
В связи с участившимися обращениями заинтересованных лиц с рядом вопросов, считаю необходимым дополнить работу одной ремаркой.
В своей работе Электрическая машина с вращающимися полюсами и публикациях на постах ветки СКИФа, посвященных этой теме, мной не было указано очевидное свойство магнитных силовых линий, а именно, то, что магнитные силовые линии входят и выходят в цилиндрические роторы по нормали (под прямым углом) к поверхности. Это свойство магнитного поля приводит к тому, что концентрация силового воздействия для гладких цилиндрических поверхностей приходится на осевую линию цилиндров. В этом случае наличие магнитного момента не приводит к вращению цилиндров. Если же на поверхности цилиндра имеются продольные неровности, например, пазы и т.п., то вращение возникает. После анализа и проведения ряда исследований для электрической машины с вращающимися полюсами наиболее подходящей оказалась поверхность цилиндра, покрытая вдоль образующей полуцилиндрами малого радиуса. Эти полуцилиндры играют роль «силовых линз», фокусирующих воздействия магнитных силовых линий в точках окружности, на которой располагаются оси полуцилиндров. Полуцилиндры могут быть смещены на одно - два деления вдоль образующей цилиндра с целью более равномерной передачи силовых воздействий магнитного поля.
Вместо полуцилиндров могут быть профрезерованы вдоль образующей цилиндра не очень глубокие прямоугольные или треугольные пазы со скругленными верхними кромками.
Таким образом, все изменения магнитного поля в воздушном зазоре будут передаваться на ротор в виде суммарного вращающего момента.
На рисунке приведен один из вариантов поперечного сечения ротора.
 Дата публикации: Прочитано: 55837 раз
Дата публикации: Прочитано: 55837 раз